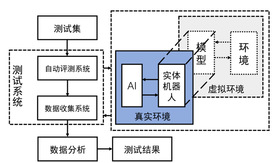
真仿合一测试平台利用一组高速摄像头和物理仿真技术,实现真实环境和仿真环境的无缝融合,避免以往单纯实体测试和单纯仿真测试各自的缺点,同时集成二者的优点,为服务机器人精准测试探索一条全新的技术路线。
测试平台系统方面实现了提供用于服务机器人一致性测试、性能测试、安全测试的测试集样例,一套能发布测试集指令的裁判系统,一套数据收集系统,测试环境生成技术方案,每一个测试集内包含自己的测试环境生成脚本,数据分析,自动生成的测试报告,显示相关信息。测试系统需要完成包括自动裁判系统、数据收集系统和测试环境在内的三大组成部分。
真仿合一测试平台:
功能测试:检测机器人是否具备设计所需的功能,定位、避障、抓取等
性能测试:不同环境、负载下机器人运动精度,手臂抓取物体精度
安全测试:
1. 系统安全性:非法操控机器人或使系统崩溃时的能力
2. 物理安全性:机器人在极端条件下(狭小空间、密集人群、人或物在机器人前突然出现),保障周围人、物、自 身安全的能力

如图所示,左上是机器人进行抓取操作测试,右上是机器人进行有虚拟障碍物的导航测试的真实场景和仿真场景的对照图。虚拟障碍物是真实场景中并不存在,在仿真环境中设置用于测试机器人性能的物体。
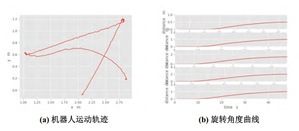
下图是测试平台对多种型号的扫地机器人进行移动导航测试的结果,左下是导航路线图,右下是运动轨迹、旋转角度曲线。